Intel / Autonomous Platform
IntroductionFocusing on UAVs, we explored and started defining new and more useful usages for drone technology, by applying the concept of modularity as an overall framework.
I worked on this project with the design team from its idealisation. The first part of the project consisted in research around the current technologies and possible target groups, definition of personas and scenarios, and outline possible features and overall user experience.
Desk & Field ResearchWe started researching UAVs and drone technology with highlighting the current possibilities, and the experimental studies.
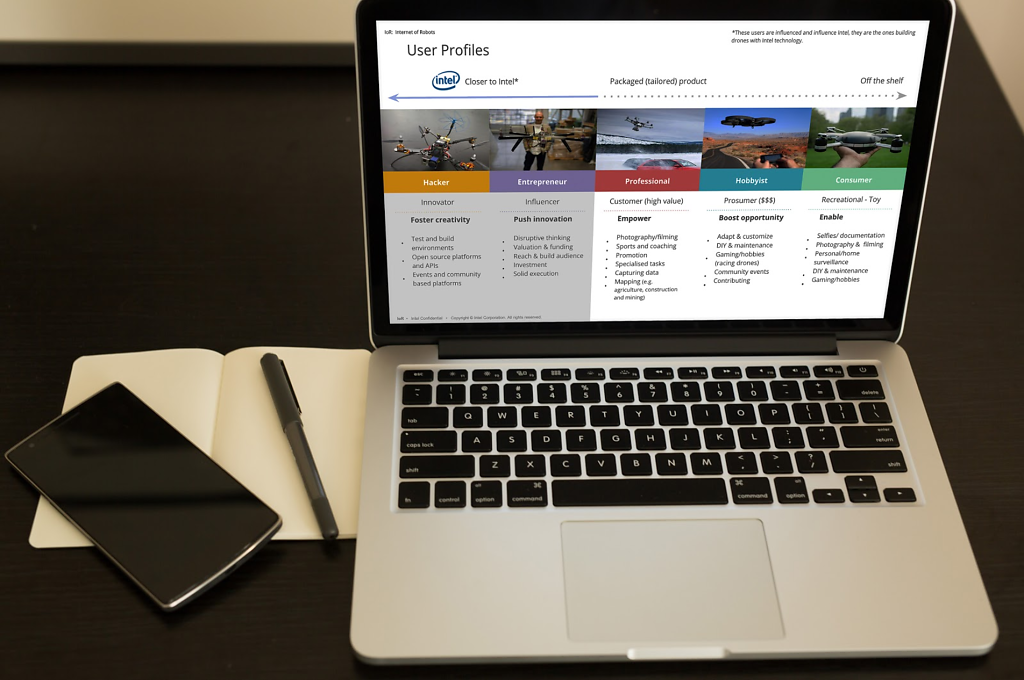
Simultaneously we focused on the target groups, on the possible usages, and on the potential needs.
We flew and tested different drones, studied their different set-ups and out of the box experience, noted the different settings, balance, gyroscope, and calibration on the controller.
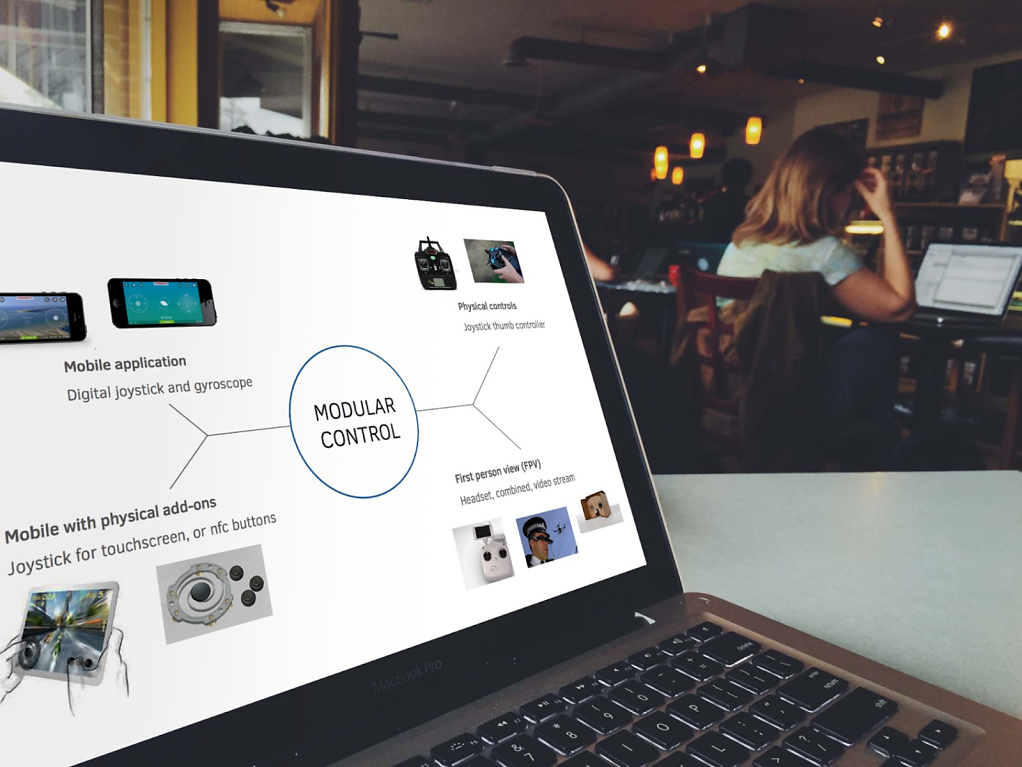
With experimenting and testing real drones, and with our technology research, we focused also on the control aspect as fundamental part of our modular concept and user experience.
We had the possibility to meet a worldwide full building envelope contractor company.
This allowed us to understand many practical needs for the enterprise industry.

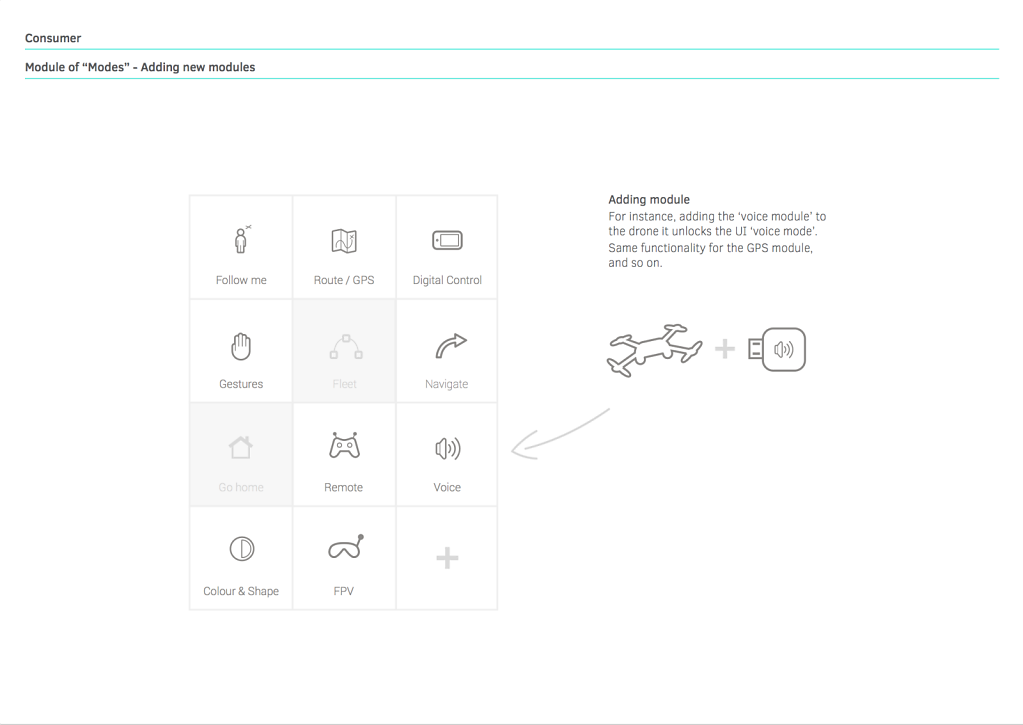
Modularity We created a modular framework based on open source modularity, adaptable to the different needs. Extending modularity can result in an easier user experience, with a wider target user group and application of the technology.
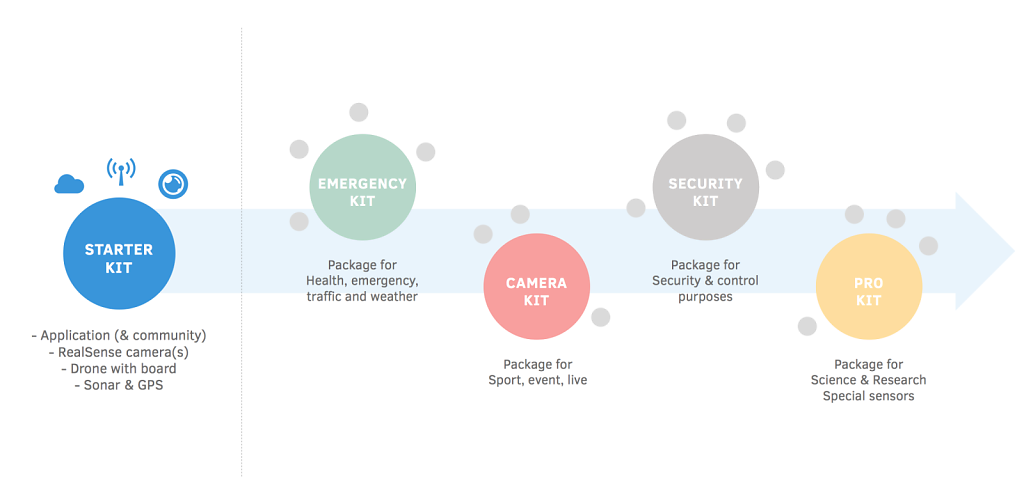
The Framework includes:
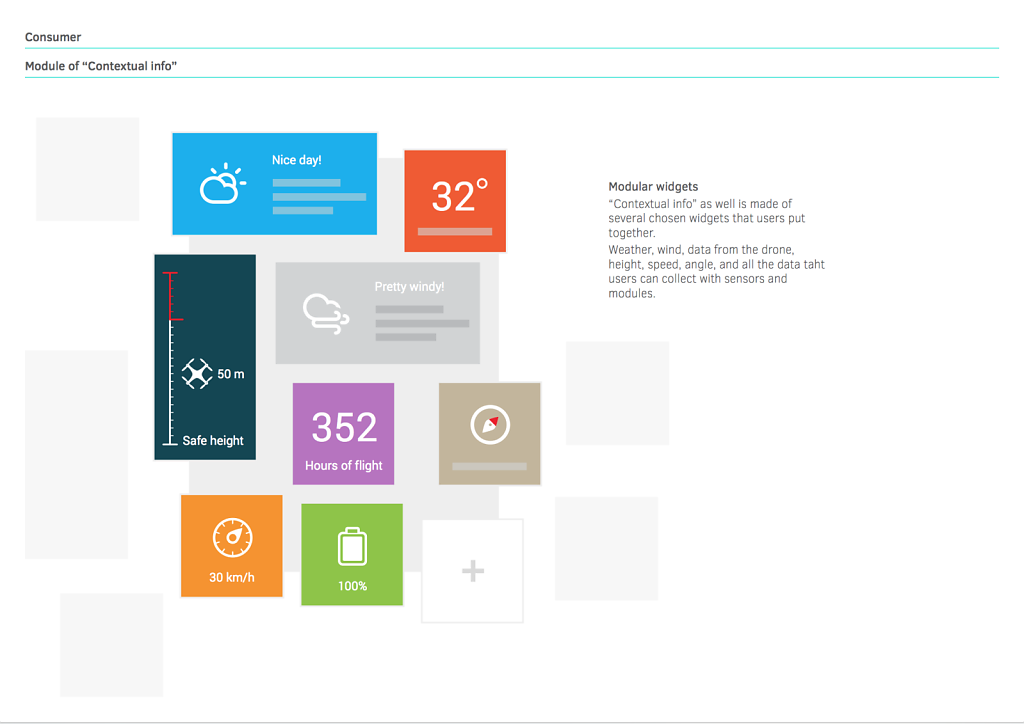
Plug and Play Modular Sensors
Each drone can be equipped with different sensors that can be added according to needs, in order to improve the drone abilities. Some examples are Ground quality sensor, air quality sensor, water quality sensors, all these can be easily added on and removed.
Add on Devices
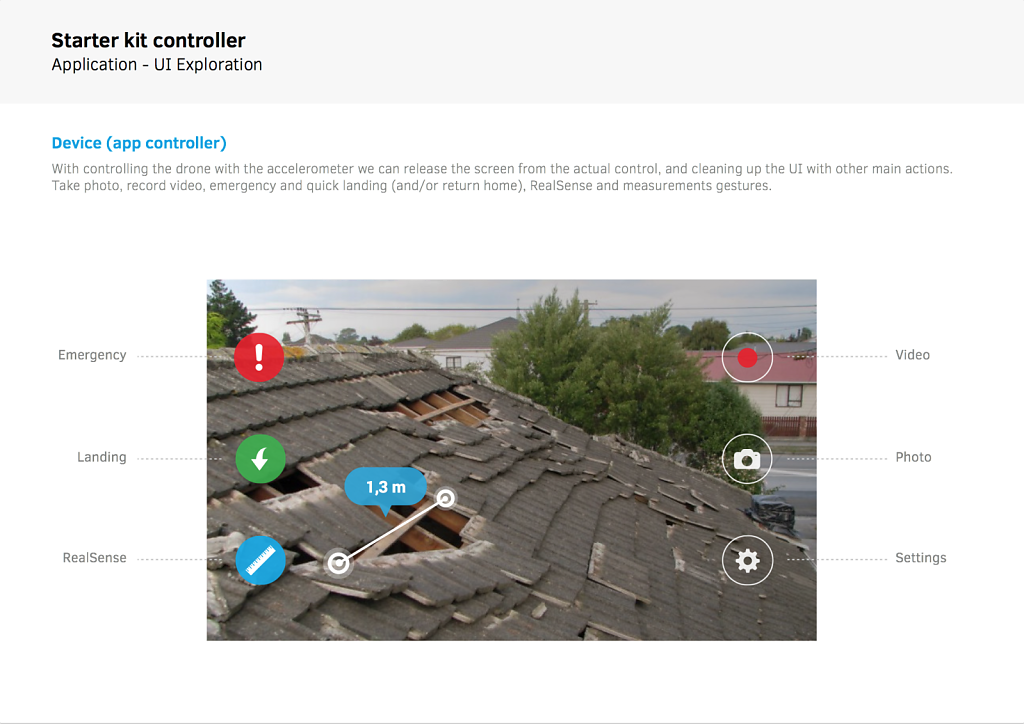
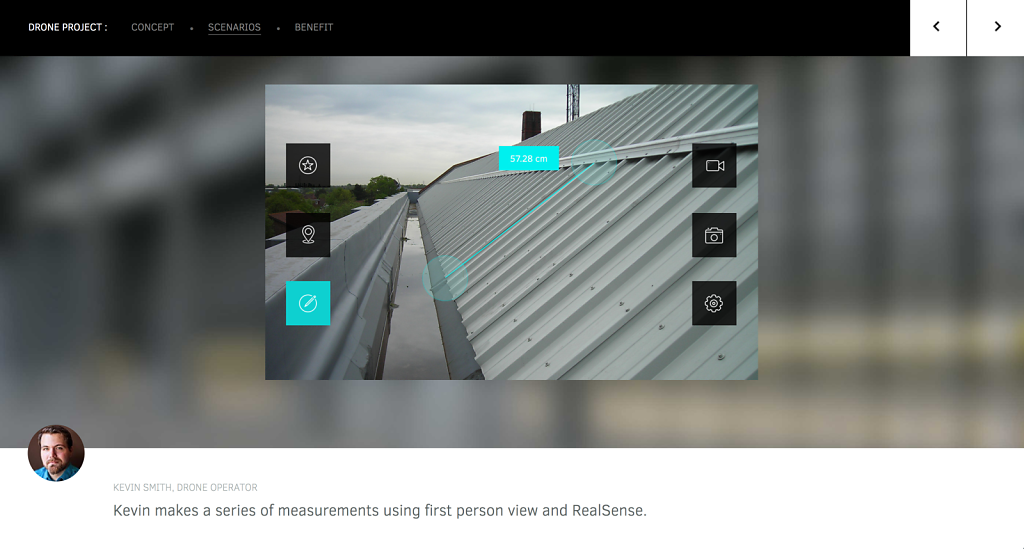
Each drone can include added on devices such as Real Sense, Sonar, GoPro or a 4K camera, this can provide tailored technical solutions for different user groups, helping the drones to perform specific tasks.
Environmental adaptability
Drones can be customisable and adapted to each environment, so that they can fly in the air, but also work under water or on the ground.
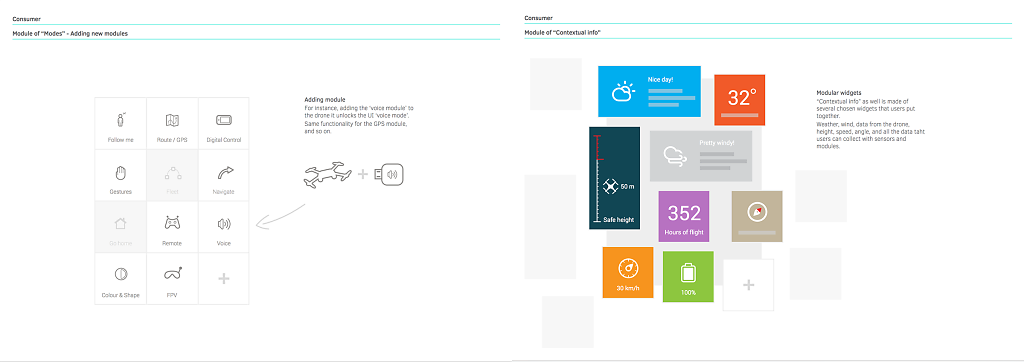
Flexible Control Capabilities
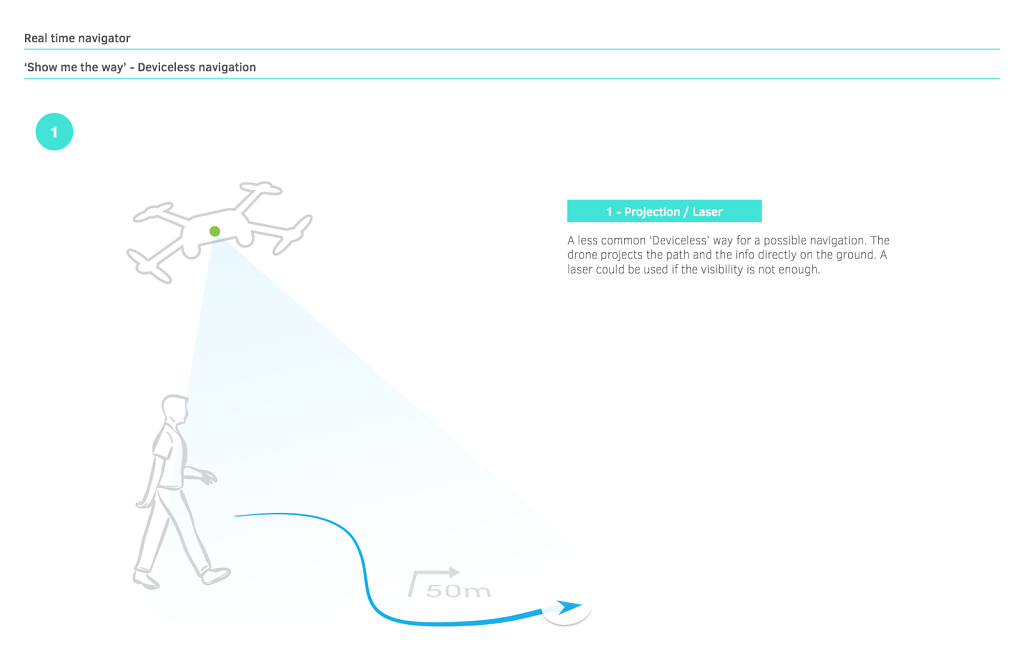
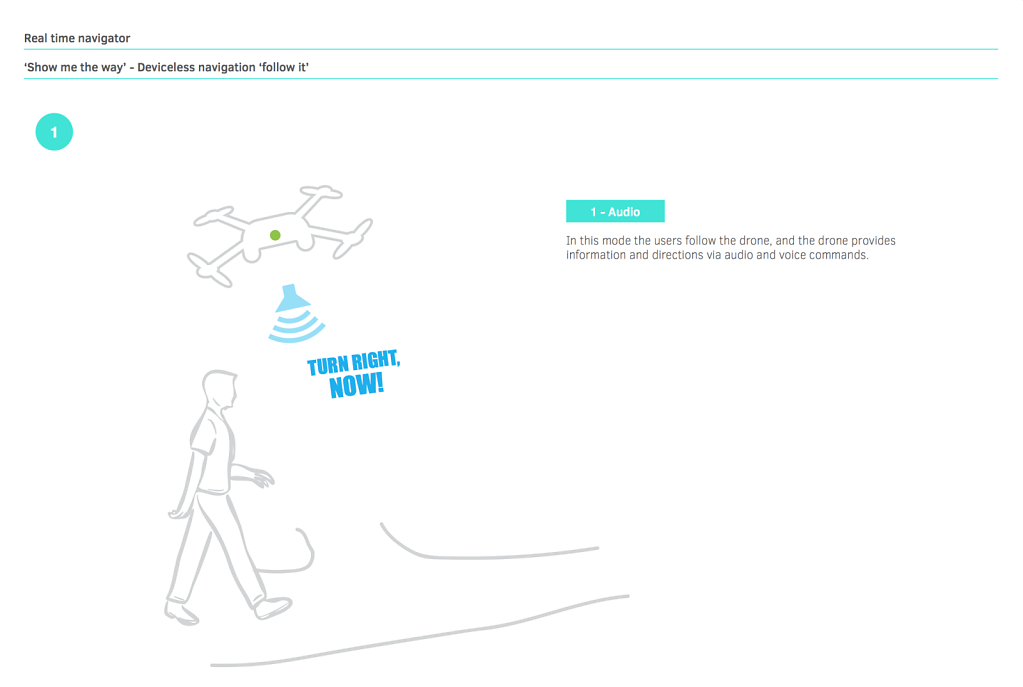
Which might include Follow me option, RC remote, Mobile gyroscope, Gestures, GPS trajectory, 3D self navigation or Voice control.
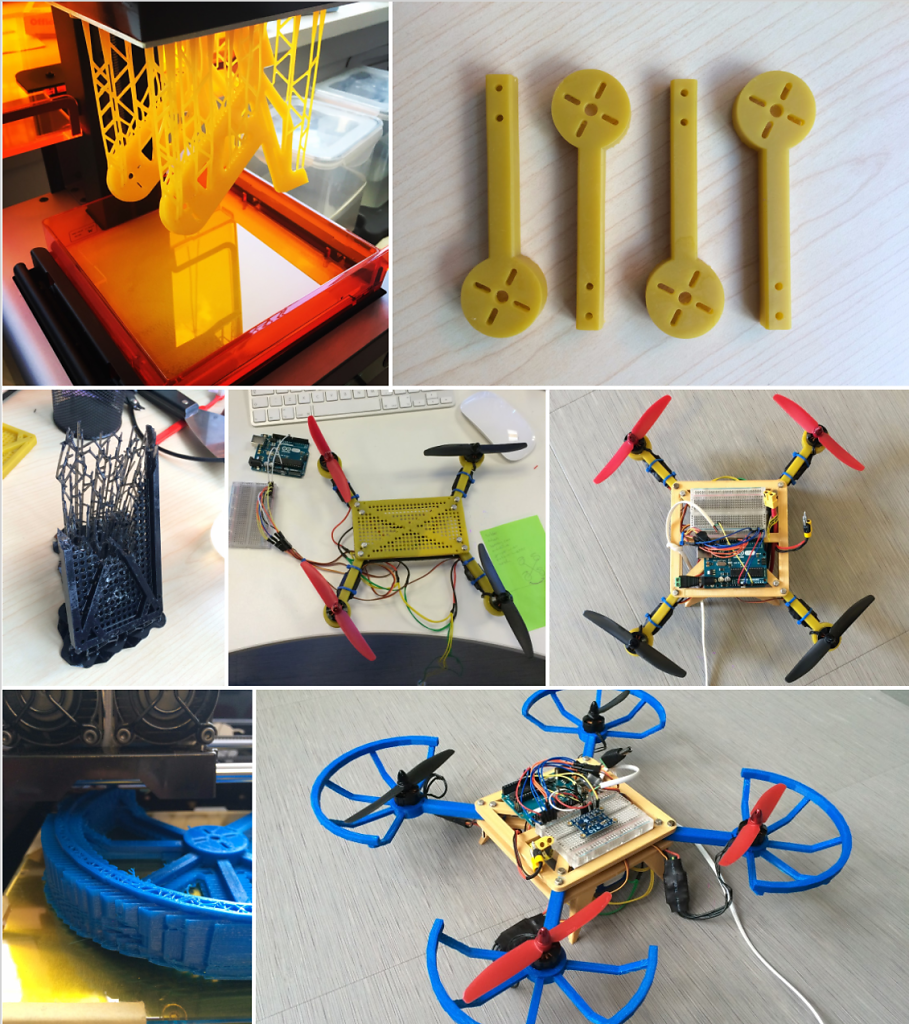
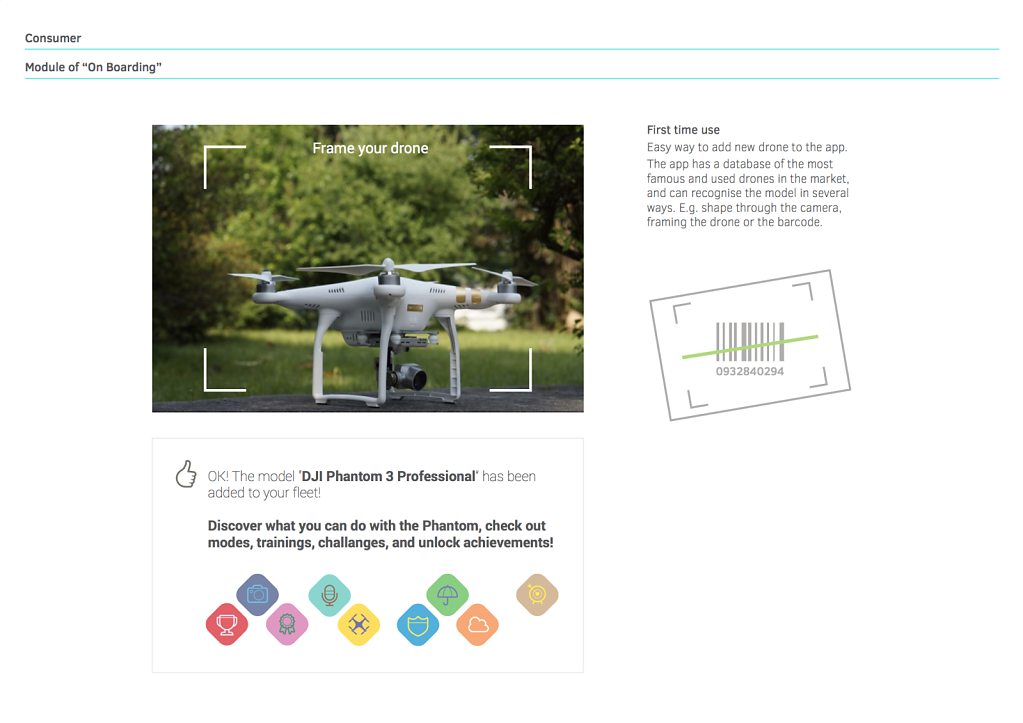
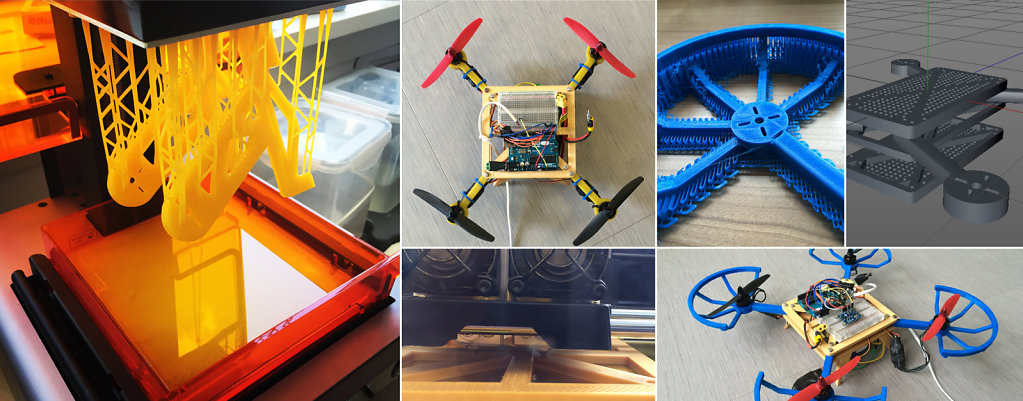
DIY drone We designed our own drone, starting from the chassis, 3d printed all its parts, assembling an Arduino board, propellers, blades, and battery.
We were able to fly the drone, without a balanced gyroscope, and started experimenting with processing.
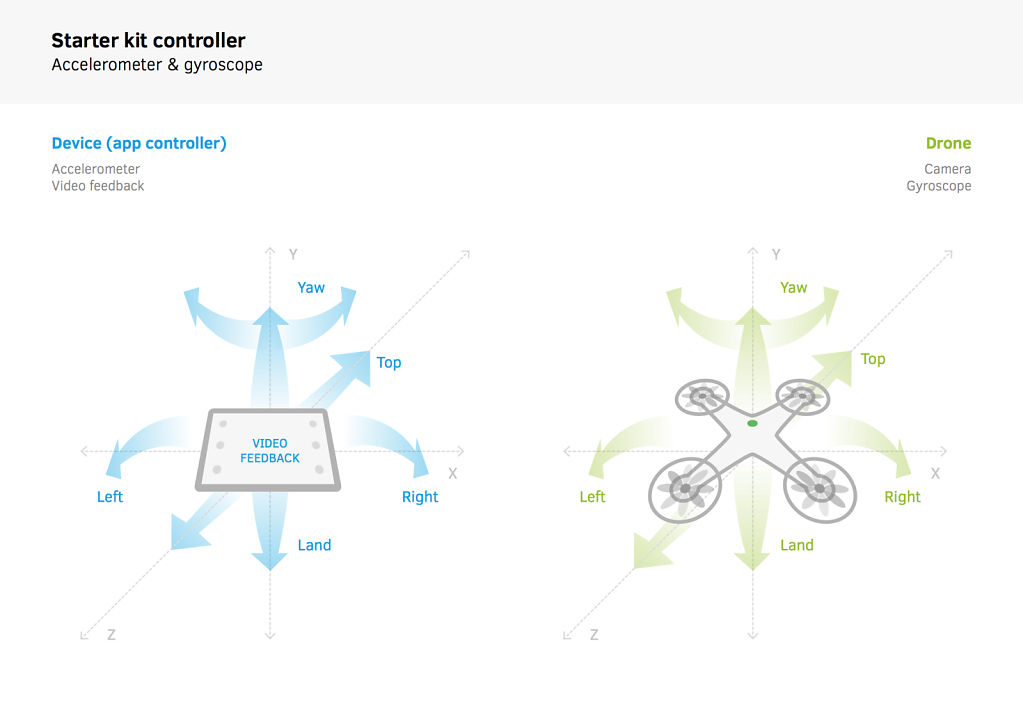
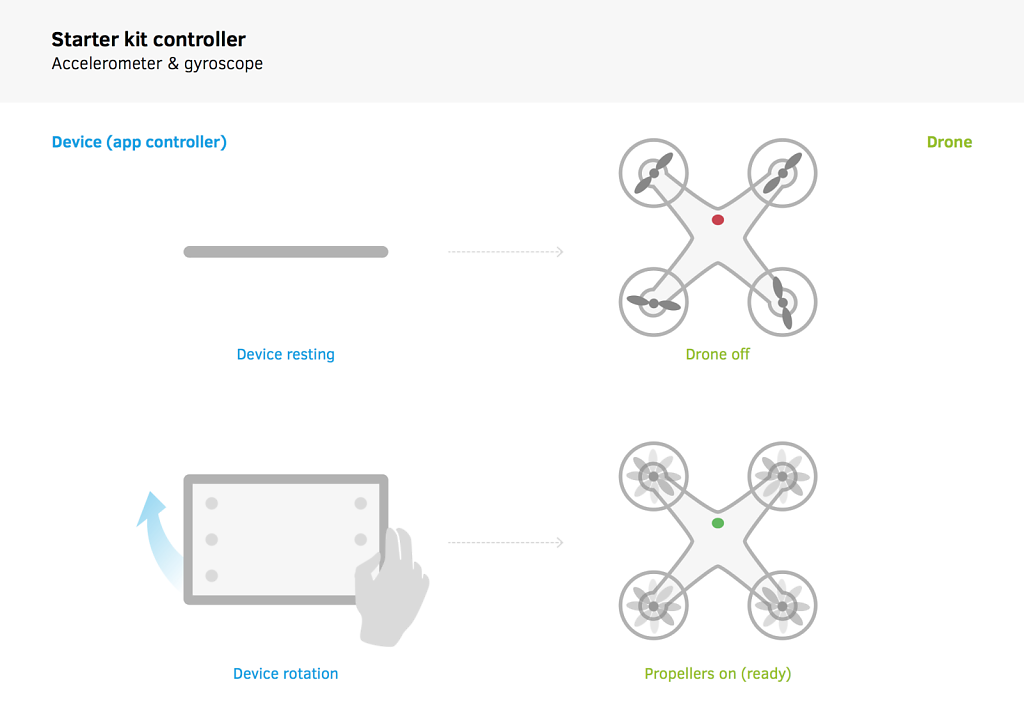
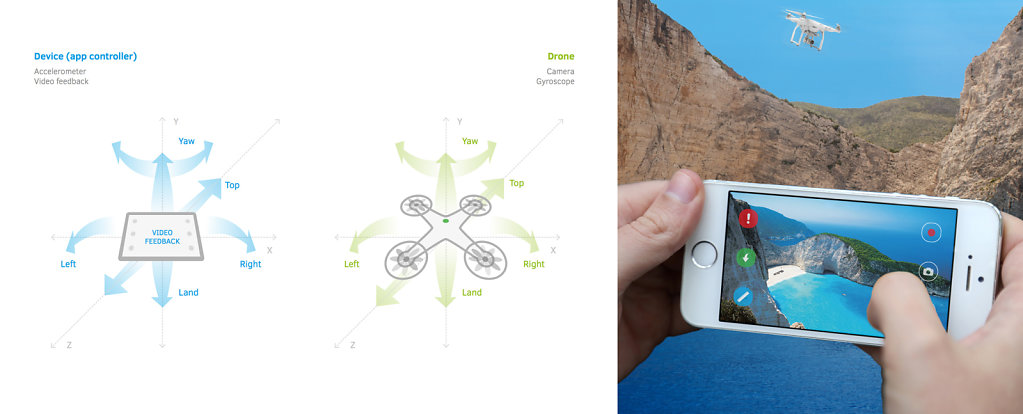
Prototype - controllerWe explored the concept of a basic digital / accelerometer controller that could be included in bundle with the drone software. This concept could be a first basic part of the modular controller system, and the prototype will help us to test it and to highlight possible issues.
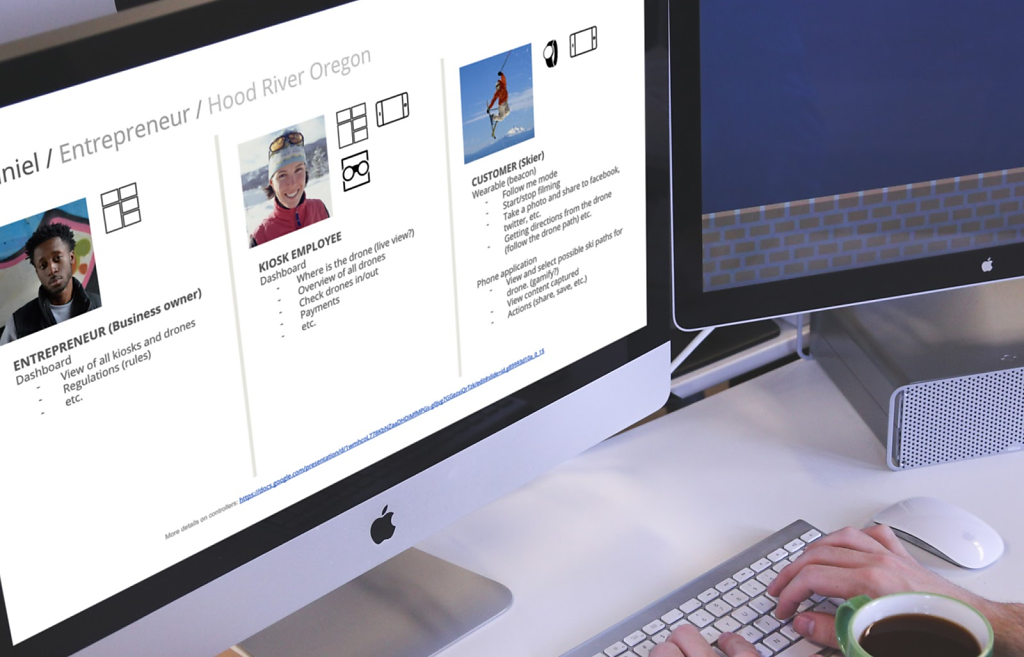
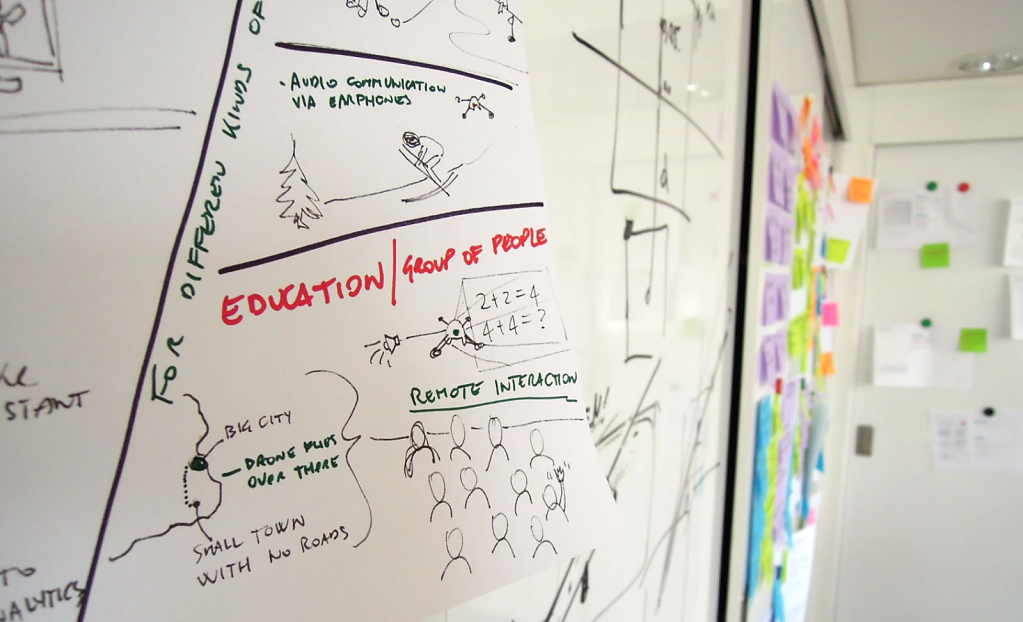
Scenarios, personas, workshops
With defining personas for each target audience we could test our concepts and the previous research on different and realistic user cases.
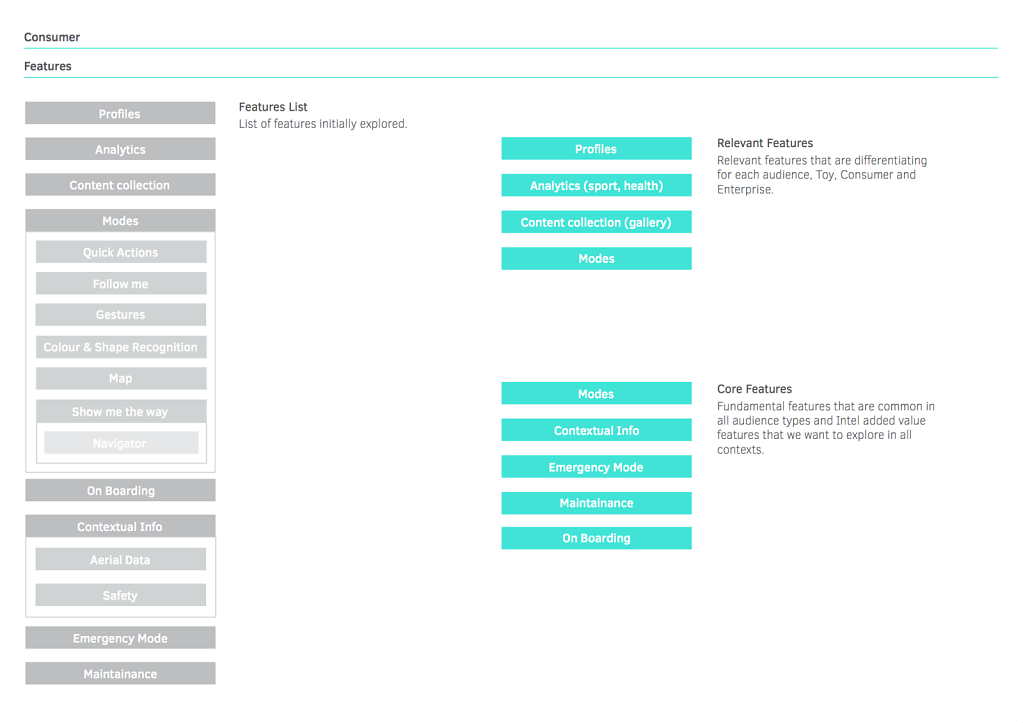
From scenarios and user flows we extracted the site maps and the features of the platform to manage and interact with drones and related services.
Highlighting the main functionality needed across different users profiles and target groups
we continued to work on the platform for drones, creating a reference design for its main functionality.
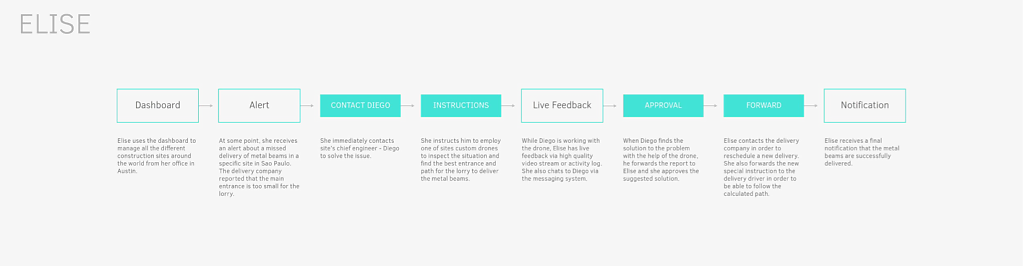
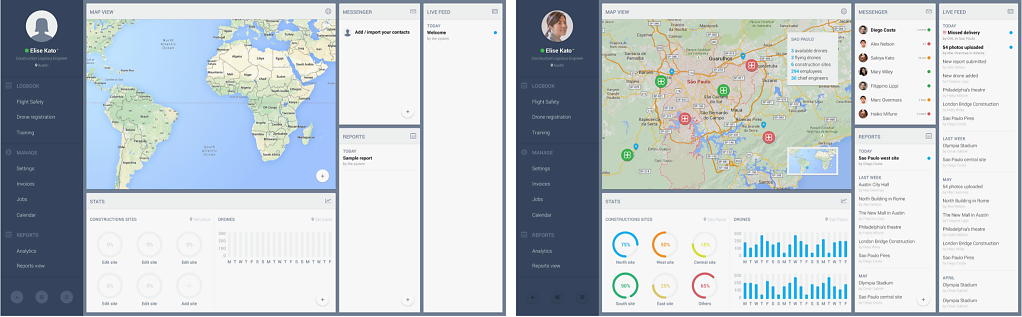
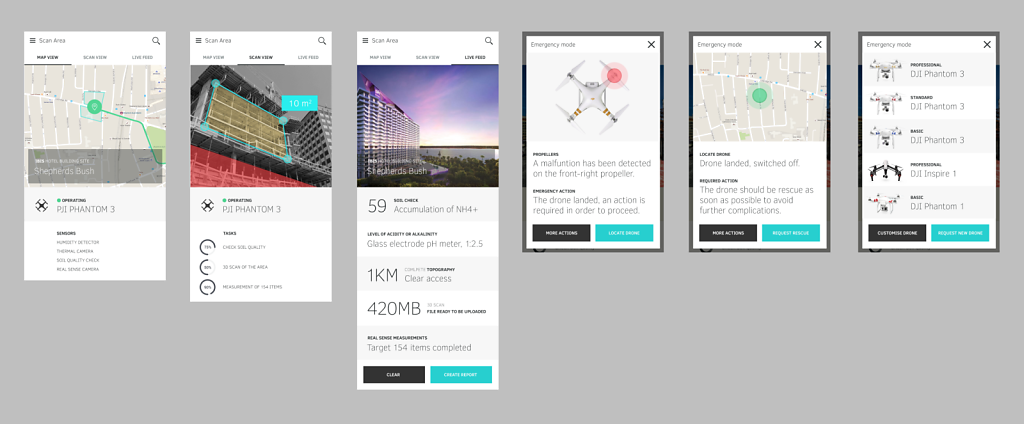
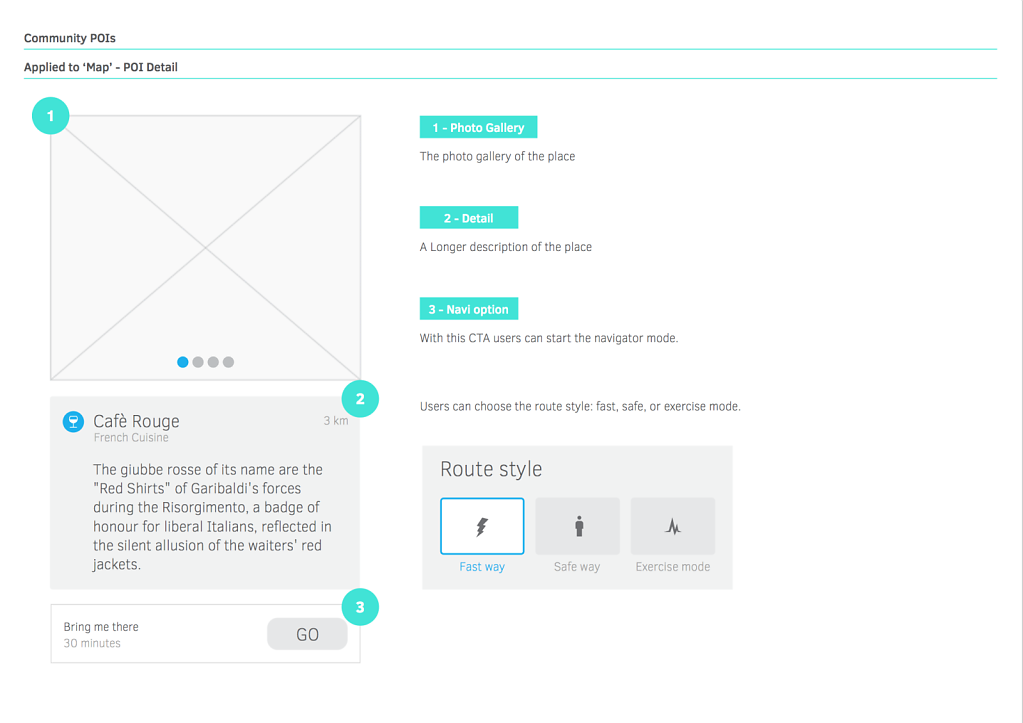
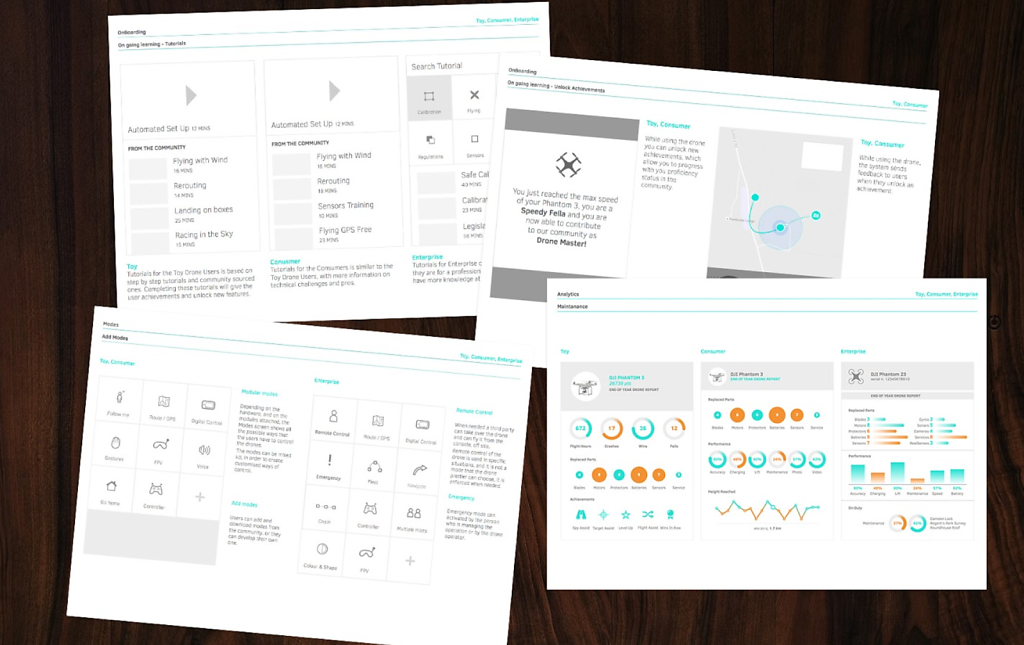
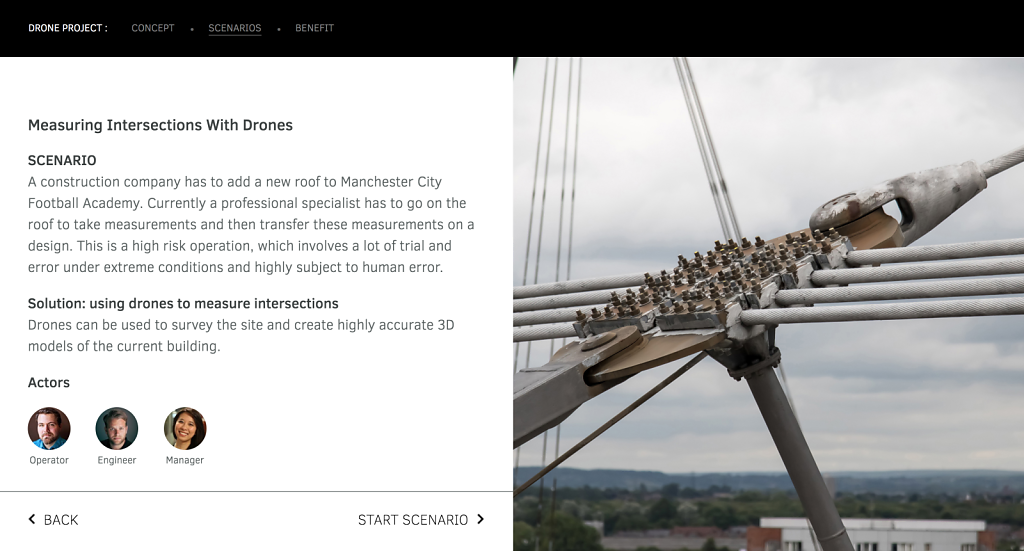
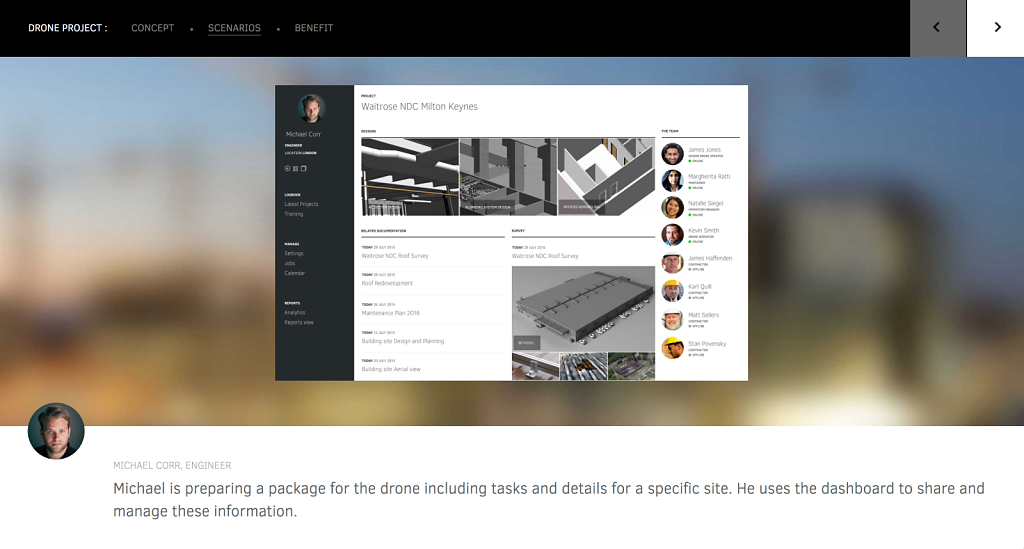
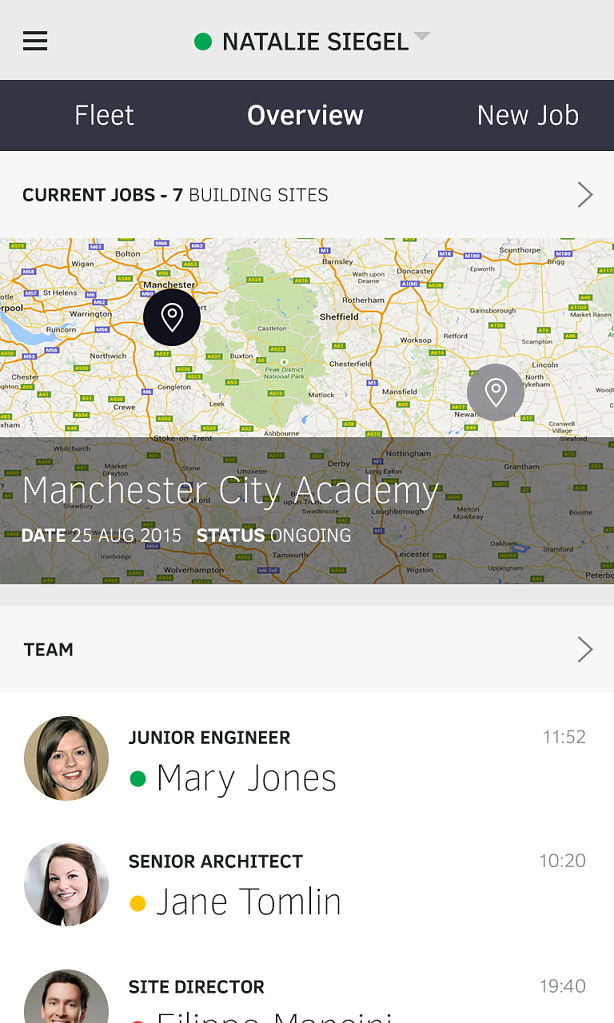
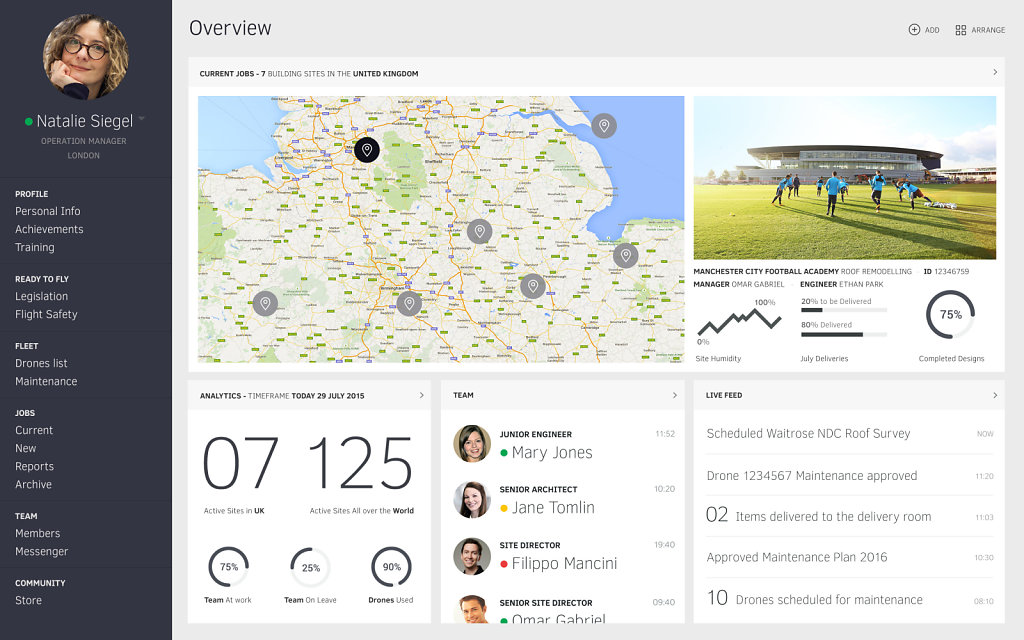
Autonomous platform / Prototype We built an interactive presentation of the project, with selecting three main enterprise scenarios that could highlight the main functionality of the Autonomous platform. This presentation was useful to test our concepts, and allowed us to proceed with a prototype in HTML, CSS, and JS: a front-end interface of the Autonomous platform, implementing our visual design, one of the scenarios, and the users we defined for the personas of the enterprise target-group. The prototype is responsive, in desktop mode behaves like a management dashboard, when in the mobile mode it shows different features to control and interact with the drone on the go.